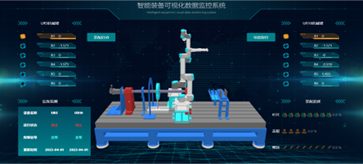
創新性的提出了雙機械臂多模態感知協同控製方法🙌🏿,實現了手勢𓀖🩹、人體、語音和視覺等的多模態融合🪁。搭建了基於數字孿生的雙機械臂協同裝配系統🧱,攻克了復雜工業裝配場景下的雙機械臂協同控製技術👨⚕️,實現了工業設備的精準模擬和智能管控
提出了非對稱間隙葉片動力學理論模型和無轉速同步傳感器下的葉尖定時測振改進方法💊,開發了旋轉葉片振動非接觸在線監測系統🕺🏻,實現了振動參數實時分析,有效降低測振操作復雜性🤶🏿,提高振動參數辨識準確度
提出了基於動力學仿真的汽輪機葉片轉子系統故障樣本生成方法,實現了多種工況下汽輪機葉片轉子系統故障類型的準確識別和分類👊🏿✋🏻,提高了汽輪機故障診斷的快速性與準確性